No matter how long humans have looked up and stared at the moon — and despite the number of satellites we’ve sent up to observe it — our maps of its terrain still hit a resolution limit.
Yet, scientists want to continually push that limit — and it appears they’ve made some headway.
Related: Safety comes 1st for Artemis moon missions despite ‘space race’ with China, NASA chief says
A new study has enlisted the help of algorithms to automate parts of a method used to reconstruct terrain data from 2D maps of the lunar surface. These algorithms, as it turns out, can drastically speed up the creation of moon maps that include details as small as individual boulders. Those maps may be what future Artemis missions use for mission planning.
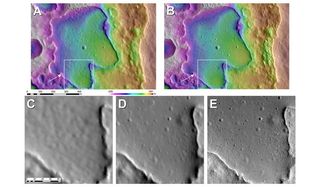
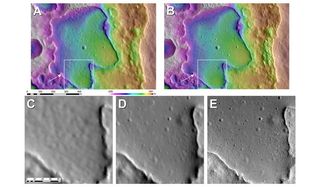
The technique, called shape-from-shading, allows selenographers (moon-mappers) to estimate the moon’s terrain based on shadows decorating its face. Unfortunately, shape-from-shading done by hand is tedious and labor-intensive; one of the largest challenges is that the technique relies on matching features, like craters and ridges, between images. Thus far, computers have been unable to automate the process.
One of the new study’s key advancements, then, is implementing software that automatically identifies features in one image and attempts to match them to identical features in another image. The researchers tested their software to create maps from data — height measurements and visual-light photographs — collected with NASA’s Lunar Reconnaissance Orbiter.
“These new map products are significantly better than what we had in exploration planning during the Apollo missions, and they will very much improve the mission planning and scientific return for Artemis and robotic missions,” geologist James Head of Brown University said in a statement.
This is especially important for Artemis, because the program’s plans call for crewed landings in the moon’s south polar regions —- areas that receive comparatively little light. Better mapping abilities can provide Artemis missions with far more detailed information on their surroundings, with supreme resolution.
Related Stories:
“That will allow autonomous landing software to navigate and avoid hazards, like large rocks and boulders, that could endanger a mission. For that reason, you need models that map the topography of the surface at as high a resolution as possible because the more detail you have, the better,” Benjamin Boatwright, a postdoctoral researcher at Brown University, said in the statement.
Boatwright and Head now plan to use their software to produce more new and improved lunar maps. Moreover, the pipeline consists entirely of open-source algorithms, which means that anyone around the world could follow and do the same.
Boatwright and Head published their work on May 28 in The Planetary Science Journal.